The research activities of research line focus on the development of advanced robotic machines targeting to assist humans in operations executed in remote and hazardous environments or in more conventional industrial and warehouse workspaces. The development of such robotic systems necessitates significant advancements in robot design, actuation, software, control and interface components.
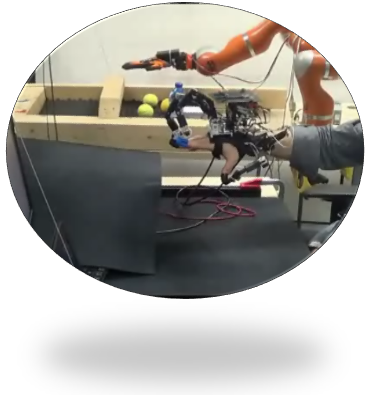
- In one direction our research concentrates on advancing the state of art of robotics mechatronics enabling the realization of robots (legged robots, humanoids, manipulation platforms and wearable devices) that can mirror the physical performance of the human body, demonstrating enhanced power and strength performance combined with physical resilience during challenging interactions.
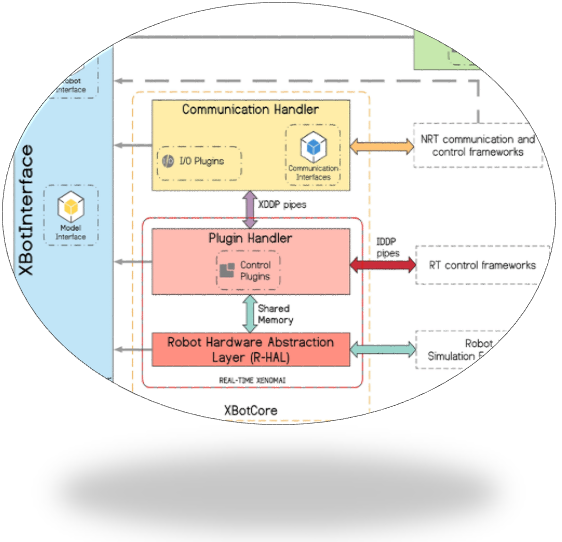
- A second line of research is devoted to the realization of real time loco-manipulation planning, interaction control, software tools and interfaces aiming to endow the developed robotic platforms with enhanced motion and interaction adaptation skills.